M S C R I
Modular Solution for Corridor Reactive Installations - by Andres BurbanoMidTerm Presentation
The MSCRI, Modular Solution for Corridor Reactive Installations is an sketch for a set of solutions to create installations which use real time video as the main input source.
The visual component of MSCRI explores light masses in real time working with present and near past of video image. The body of the spectator affects with his/her motion the system, but nothing is attached to his/her body.
In MSCRI the real time video image is self mixed or self blended but it happens using different previous frames. Visualization of algorithms are used as a curtain -mask- behind the video in real time and the previous frames. Additional video filters are explored in order to enhance the predominance of certain luminance conditions. Additionally some basic robotic elements are
included in order to scan a wider area with a distance sensor.
Considering the theory of Time Scales in music (arts) proposed by professor Roads we can say that this installations works, from the pixel time scale to messo scale. The idea to build a solution for corridors came out from the last MAT presentation in CNSI building.
Software
The software component of MSCRI is done in Processing including two extra libraries: the video library and the serial port library. Processing can be considered as a subset of Java object oriented programming language. Processing is a fast tool for prototyping and overall it is versatile and stable. The problem with processing is that it is not fast, actually sometimes is really slow.
The video library allows us to work with video input from an external HD video camera and
the serial library allows us to read data from a serial port that in this case is connected to the
Wiring I/O board and to a servomotor.
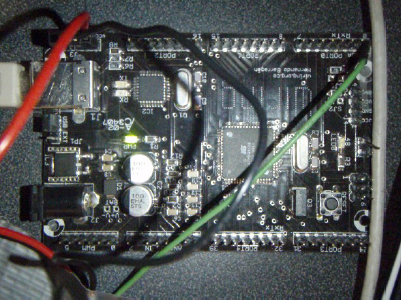
Hardware Wiring
The wiring I/O board is a powerful solution to develop basic electronics, it is programable with a language that is pretty close to Java as well.In MSCRI we have two different programs the first one is to read the ultrasonic sensor, that in fact is a useful tool to detect position and distance. The other program simply controls a servomotor which is rotating 90 degrees and then it
comes back.
Algorithms
The algorithms for the visualization that works as “masks” for video in different time intervals
were found in Hidden Order book -by John H. Holland- and are of great value studying
complex systems, complex adaptive systems and autonomous agents.Lotka-Volterra
“The Lotka–Volterra equations, also known as the predator-prey equations, are a pair of first order, non-linear, differential equations frequently used to describe the dynamics of biological systems in which two species interact, one a predator and one its prey. They were proposed independently by Alfred J. Lotka in 1925 and Vito Volterra in 1926. ” From Wikipedia, the free encyclopedia. The Lotka-Volterra algorithmic visualization in MSCRI is as a plot where X axis is the predators population and Y axis is the Prays population.
From Wikipedia, the free encyclopedia.
Cellular Automata
“Cellular automaton (plural: cellular automata) is a discrete model studied in computability
theory, mathematics, theoretical biology and microstructure modeling. It consists of a regular
grid of cells, each in one of a finite number of states. The grid can be in any finite number of
dimensions. Time is also discrete, and the state of a cell at time t is a function of the states of
a finite number of cells (called its neighborhood) at time t − 1. These neighbors are a
selection of cells relative to the specified cell, and do not change (though the cell itself may
be in its neighborhood, it is not usually considered a neighbor). Every cell has the same rule
for updating, based on the values in this neighbourhood. Each time the rules are applied to
the whole grid a new generation is created.”
From Wikipedia, the free encyclopedia.
Physics
There is an additional MSCRI test using particles with basic Newtonian physical properties,
like, friction, gravity, direction.
Hardware
The basic Idea of the hardware solution is to add a new spatial dimension to work in 3D, the
potentialities of the Z axis to the 2D process natural to the video processing. The ultrasonic
ping sensor is able to give us information about the distance of the public. Because the motor
movement the sensor is able to scan the space in many directions and not only in one.
High Definition Video Input, is a Sony HD handy-cam that is connected trough firewire connector.
Ping: Sensor
Is the parallax ultrasonic ping sensor which woks with one emitter and one receptor of
ultrasonic pulse. It calculates the distance of one object/subject because the sonic pulse
bounces.
Servo Motor: Actuator
It is a Futaba servomotor that you can control step by step with the Wiring I/O board.
New Goals
1. Develop a clear idea with the physical interfaces that includes ping sensor + video camera + servo motors. The idea is to explore the idea of embodiment.
2. Adapt the software applications to characteristics of the physical interface solution.
3. Plan an exhibition with the results of the MSCRI.
Schedule
May - 1st week -> physical interfaces
May - 3th week -> Adapt the software applications
June - 1st week -> Plan an exhibition in CNSI building.